韩国研发可编程机器人薄片 可变形、移动、抓取物体
盖世汽车讯 据外媒报道,在自适应机器人技术飞速发展的背景下,韩国科学技术院(Korea Advanced Institute of Science and Technology,KAIST)研发出一种可编程机器人薄片,可变形、移动,还能抓取物体,而且无需机械铰链或外部结构重组。该项创新有望为实现能够实时适应环境变化的下一代机器人铺平了道路。
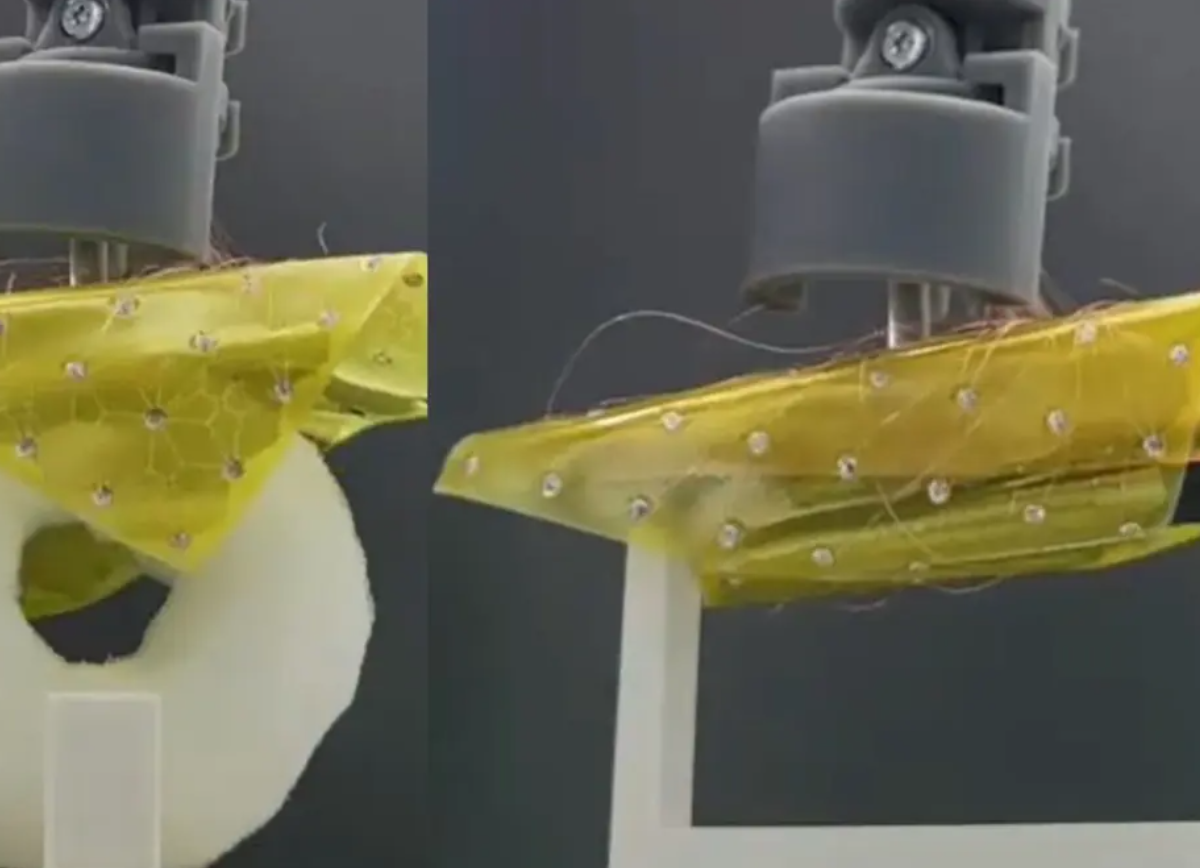
机器人薄片(图片来源:KAIST)
该研究团队由KAIST机械工程系的Kim Jeong教授和Park In-kyu教授共同领导,成功发布了一项名为“可现场编程的机器人折叠片”(field-programmable robotic folding sheet)的创新技术。该技术融合了物理人工智能与软件控制的可重新编程功能。这一突破性成果为机器人领域长期存在的难题——如何构建能够根据任务或环境变化灵活调整形态的系统,且无需每次重新构建或设计——提供了有效的解决方案。
无固定铰链的折叠设计
基于折叠的变形机制多年来一直是机器人技术中的首选策略,其灵感来自于折纸艺术,因而高效且直观。但是,传统系统依赖于预先设计的铰链和固定的折叠路径,限制了灵活性与适应性。
责任编辑:枯川
网友评论